

RP11 - Smart Car
Course Objective
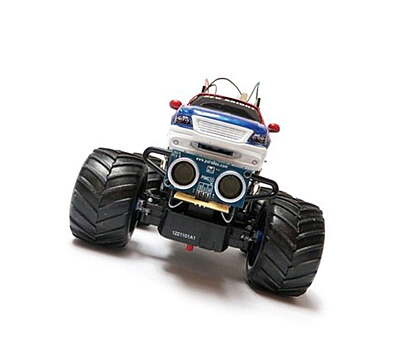
The primary objective of this course is to teach students the art of coding with Python. They will also be taught to program and control the Raspberry Pi (RPi) board using the Python language. Students will learn to work with simple components such as LEDs, buzzers, sensors, servo motors, DC motors – all components that are used in the construction of robots. Gradually, they will be taught to build a smart car and control it using the RPi board and Python programs.
Projects
- Projects with LEDs & Buzzer
- Obstacle Indicator
- Automated gate
- Distance Calculator
- Smart car
- Line Tracking Robot
- Obstacle Avoiding Robot
- Object Following Car
- Path Finding Robot
Take Away
At the end of this course, students would have learnt to write programs in Python. They would also have learnt to use devices such as DC motors, motor controller boards and other RPi add-on boards. They will understand the use of various types of sensors in robots.
Related Courses
RP12 – Robotic Arm
RP13 – Walking Robot

RP12 – Robot Arm
Course Objective
A Robotic Arm is one of the most important types of robots used in the industry. Robotic Arms are used to perform various tasks like picking, turning, sorting, placing etc. as part of automating all the steps in manufacturing.
In this course, students will learn to build and program a robotic arm.
Projects
- Build & Program Robotic arm
- Pick and Place robot
- Stacking Robots
Take Away
Students will learn to build a complex robotic structure, using multiple servo motors, using motor controller boards, developing complex algorithm for managing movement of the arm. They will leverage the knowledge gained in the previous courses and learn to write complex programs to control each aspect of the robotic arm.
Related Courses
· RP11 – Smart Car
· RP13 – Walking Robot

RP13 – Walking Robot
Course Objective
Quadruped robots mimic animal walking gait and they have certain advantages like walking on terrain and extremely rough surfaces. Obstacles can impede the movement of wheeled vehicles, where a quadruped can adapt to avoid obstacles by adjusting its height.
Students will learn to develop a robot which simulates the walking of an insect. The projects in this course will teach students the use of multiple servo motors and the challenges associated with robots that can walk.
Projects:
- Quadruped walking Robot
- Four-Legged Walking Robot with Remote and other sensors
- Managing Multiple RPIs
- Communicating & controlling Remote RPIs
- PIR Sensor
Take Away
Students will learn to build a complex robotic structure, using multiple servo motors. They will leverage the knowledge gained in the previous courses and learn to write complex programs to control each aspect of the robot. They will also learn about balancing and walking movements of robots.
Related Courses
· AC12 – Robotic Arm
· AC14 – Gesture Controlled & Bluetooth Controlled Robot
Max Batch Size : 4
Course Duration : 12 weeks
Session Duration : 90 mins

RP14 – Gesture Controlled
& Bluetooth Controlled Robots
Course Objective
In this course, students will learn to control robots developed in the previous courses in accordance with the signals sent from a smart phone using an Android Application and Bluetooth Communication. They will also learn to use gestures to control the robots by passing signals across multiple sensors.
Projects
· Gesture & Bluetooth controlled car
· Gesture & Bluetooth controlled robotic arm
· Gesture & Bluetooth controlled walking robot
Take Away
Students will learn to build a complex robotic structure, using multiple sensors. They will learn to develop complex programs to enable wireless communication between the sensors. They will the concept of using Bluetooth signals to pass messages to control the robot.
Related Courses
· RP13 – Walking Robot
· RP15 – Pi Cam
Max Batch Size : 4
Course Duration : 12 weeks
Session Duration : 90 mins
RP15 – AI Vision Systems
Course Objective
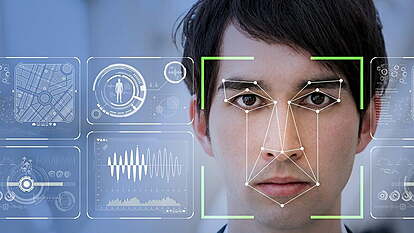
The Pi camera module is a portable light weight camera that supports Raspberry Pi. It communicates with Pi using the MIPI camera serial interface protocol. It is normally used in image processing, machine learning or in surveillance projects.
Projects
- Face recognition
- Face tracking
- Object identifier
Take Away
Students will learn use the Pi camera module. They will learn concepts of programming for image recognition and processing.
Related Courses
- RP14 - Gesture Controlled and Bluetooth Controlled Robots
- RP16 - Humanoid Robot
Max Batch Size : 4
Course Duration : 12 weeks
Session Duration : 90 mins
RP16 – Humanoid Robot
Course Objective
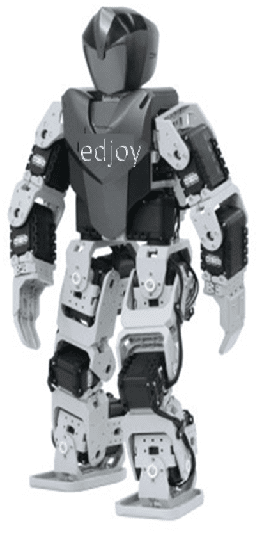
A humanoid robot is a robot with its body shape built to resemble the human body. The design may be for functional purposes, such as interacting with human tools and environments, for experimental purposes, such as the study of bipedal locomotion, or for other purposes. In general, humanoid robots have a torso, a head, two arms, and two legs.
Students will learn to build a robotic structure which can perform certain actions like a human and walk.
Projects:
Building a humanoid robot model
Take Away
Students will learn to build a complex robotic structure and develop complex programs.
Related Courses
- RP15 – Gesture Controlled & Bluetooth Controlled Robot
- RP17 – Self Balancing Robot
Max Batch Size: 4
Course Duration: 12 weeks
Session Duration: 90 mins
Max Batch Size : 4
Course Duration : 12 weeks
Session Duration : 90 mins

RP17 – Self Balancing Robot
Course Objective
Self-balancing robot is a two-wheeled robot which balances itself and prevents itself from falling. This is like a rider of the unicycle balances by moving himself in the same direction of the inclination so that he stays vertical, similarly the self-balancing robot balances by moving in the same direction of the inclination.
Students learn to build a robot on two wheels and program it to balance itself while moving and prevent it from falling
Projects
Building and programming a self-balancing robot
Take Away
Students will learn to build a complex robotic structure and develop complex programs.
Related Courses
- RP16 – Humanoid Robot
- RP17 – Self-balancing Robot
Max Batch Size : 4
Course Duration : 12 weeks
Session Duration : 90 mins
RP18 – Swarm Robots
Course Objective
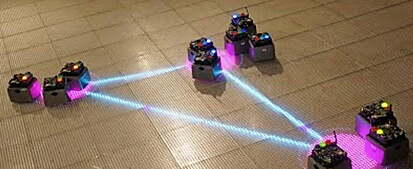
Swarm Robotics deals with Artificial Swarm Intelligence between multiple robots. The robots communicate and coordinate among themselves and complete a mission.
In this course, students will learn to build autonomous swarm robots enabled with master-slave communication. The master robot controls the slave robot while performing its own task and the slave robot functions based on the signal received from the master robot (both being autonomous).
Projects:
· Building and programming swarm robots
Take Away
Students will learn to build swarm robots, understand robotic locomotion and swarm communication.
Related Courses
- RP16 – Humanoid Robot
- RP17 – Self-balancing Robot
Max Batch Size : 4
Course Duration : 12 weeks
Session Duration : 90 mins